Presentation of the simple example
For an easier visualization in the Renew simulator, we have defined notations without subscripts, e.g., the formal notation of atomic propositions B for set Y = {y1, y2, y3, y4} (Fig. 1) is replaced here by set {a, b, c,w}, in exactly this order, with w assigned to the free space y4. Moreover, the symbols ¬ or ∧ are replaced in Renew with the syntax “!“, respectively “,“. The True value returned by the associated Büchi automaton of the co-safe LTL formula, is expressed in the tool with “1“.
Let us consider for example the transition t3 from the first RobotOPN model. The transition label is modeled in Renew (c, 1′p5, 1′p4, . . .) and corresponds to the information required for the synchronization, used by the GEF: the robot occupies one unit in the region labeled with c (modeled by p5) while freeing its position from the free space w (modeled by p4). Thus, the atomic proposition for c is evaluated as True. The last parameter from the transition label represents additional information about the robot. In our example, the last data contains a number expressing the robot’s time to move from p4 towards p5.
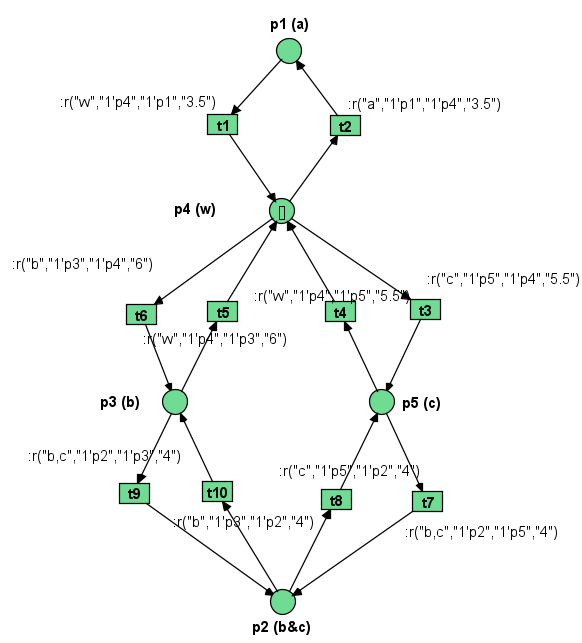
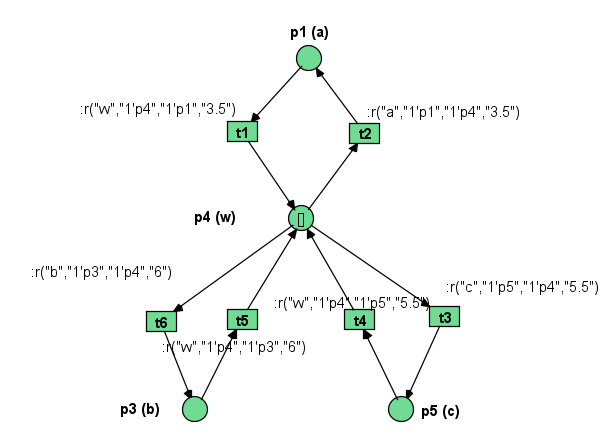
Figure 1: RobotOPN models: r1 and r2 (denoted as qpn in Renew) (left) can move freely in the workspace. Robot r3 (denoted as qpn2 in Renew) (right) is not allowed to enter the overlapped region between y2 and y3
Process
Step 1 : Download the simulation software Renew
Please refer to the Renew Installation window.
Step 2 : Download the simple example files
Please click here to access the files on Github.
Step 3 : Open the example on Renew
The procedure for the launching on the example in Renew is:
- Open the Powershell in the directory with the example files, containing the Java script Eval.java.
- Execute “javac Eval.java” in the Powershell
- Open Renew from the Powershell ( type in the path of the directory containing the Renew software adding \renew )
- In Renew, open “system_net_2r_simple.rnw”
Step 4 : Simulate
Simulate Step by Step (Ctrl+I) or completely (Ctrl+R)
Presentation of the files
The System Net : system_net_2r_simple
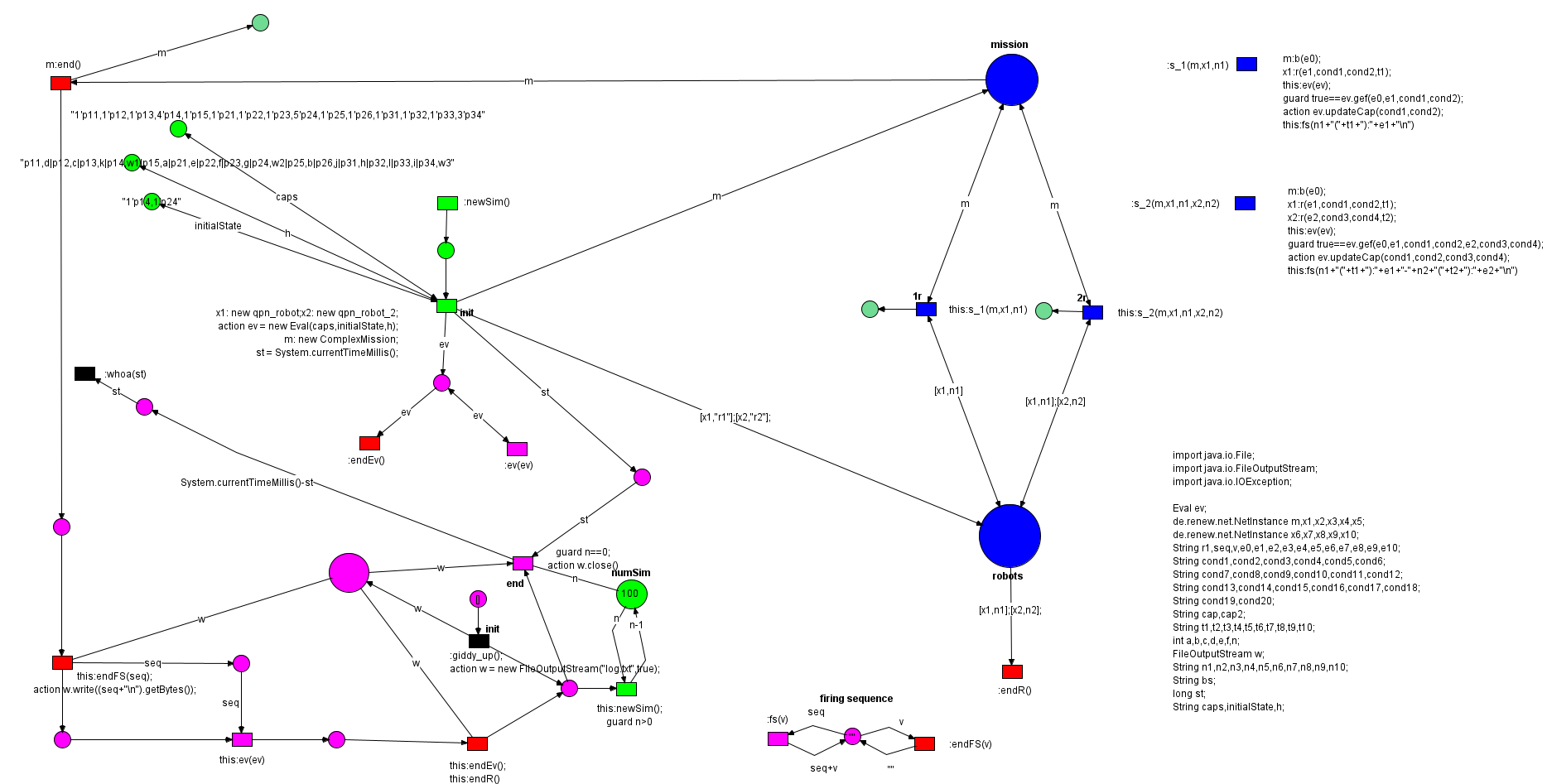
This is the main pilot file that links all parts of the model together. In order to understand the different elements of this file, there is a Color code :
- Blue: System Net
- Green: Elements used to launch a simulation
- Red: Elements used to end a simulation
- Magenta: Processing of the information, display of the best solution
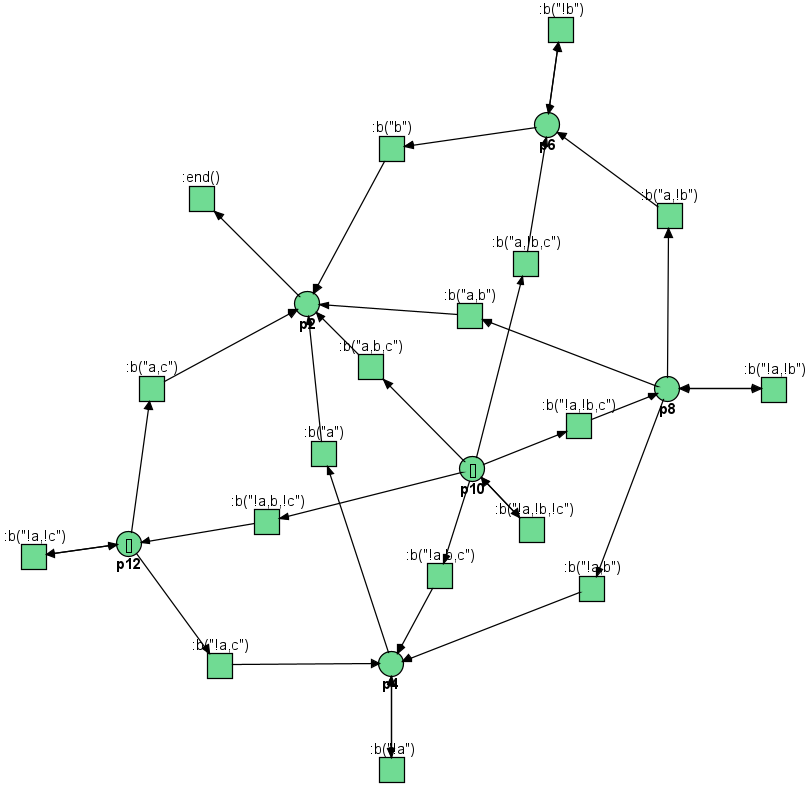
The Specification Net (SpecOPN) : simplemission
The Robot Petri Nets : qpn and qpn_2
In this simulation, we use two types of RobotPN :
Information on the files
Simulation information :
- At all times, you can observe the state of the robots nets by right-clicking the number contained by the Master Net place and double-clicking on one robot.
- You can simulate by choosing the fired place. After having fired “init”, you can double click on a transition si and choose what transition to fire.
- This simulation is done for an LTL formula which implies the visit of three regions of interest (“a”, “b”, “c”), but requiring the visit of region “c” before visintg “a”. The team of 3 robots evolves in an environment with 3 regions of interest from which two of them overlap.
Addional remarks:
- The system will be executed as many times as the initial marking of place “numSim”.
- All the traces will be accumulated to the file named “log.txt”.
- Besides storing in “log.txt” the solutions found, the “best” one will be in place named “bestSol”. Being initially “”, each time a new solution is obtained, it is compared with the current best, by means of the function “select_best” in the class “Eval”. In its current version, “best” means “shorter” in terms of number of chars, but this is so just to check the feasability. The function could/should be much more sophisticated
- This example contains two different types of robots: two as the initial example, and a second one which is not allowed to visit the intersection area
- It has also been added a way of giving names to robots for an easier understanding of the solutions